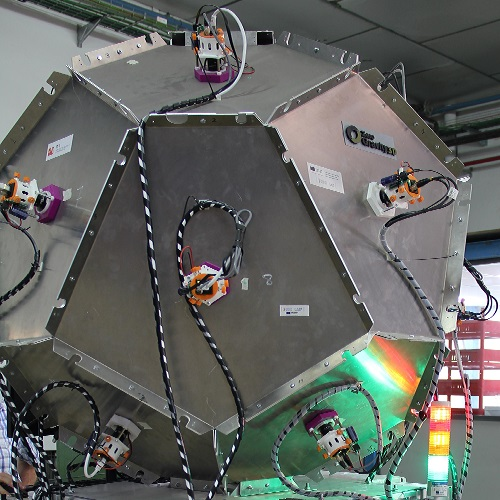
ITI is creating an innovative inspection system that uses 360° 3D Artificial Vision techniques for online quality control. This solution will be easy to integrate into the production process and allows real-time capture, 3D reconstruction and inspection of each part while it is in free fall, without any contact, manipulation or concealment. The main goal in this project is to increase performance of data acquisition for a 3D industrial inspection system by improvements in the object detection algorithms to be run close to the cameras in a low power execution platform. This objective will be achieved by means of code parallelization and network optimization.
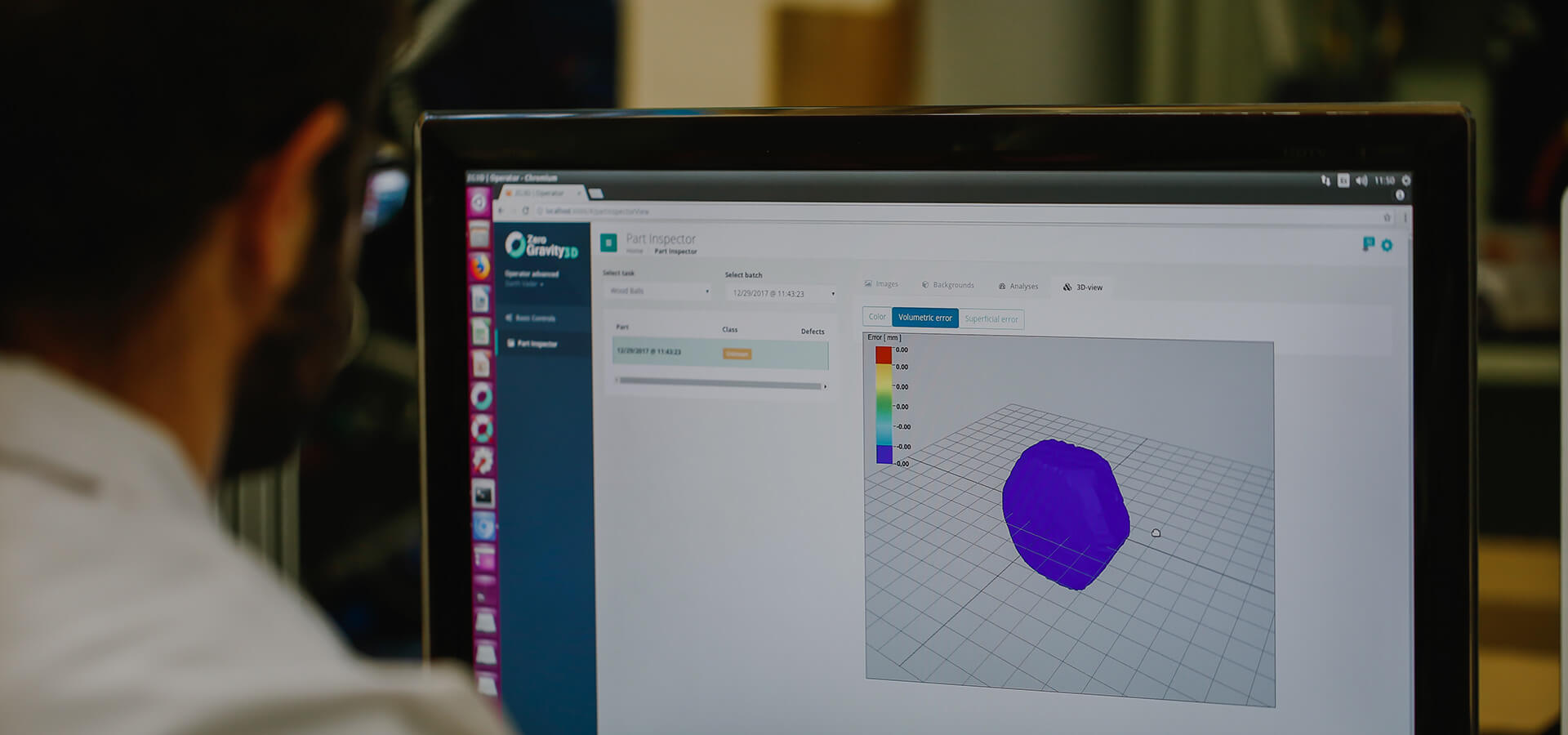
ITI is designing and developing two use cases for 3D industrial inspection and robotic arm calibration. In addition to that, the Institute is participating in the reference architecture, identifying all the required software and hardware components to optimize the throughput and latency of the system.